- temp sensors
- actuator communication
- imu / GPS
- main motor
- Controller
- data collection
- e-stop control
#### What was completed?
#### What is in progress?
- motor selection
- controller selection
- PCB improvements
- battery requirements (based off motor selection)
- boat computer decision
- esp32
- rasberry pi
- [flight controller](https://holybro.com/collections/autopilot-flight-controllers/products/pixhawk-4?variant=43534637039805)
- Software
- [ardupilot](https://ardupilot.org/dev/docs/raspberry-pi-via-mavlink.html)
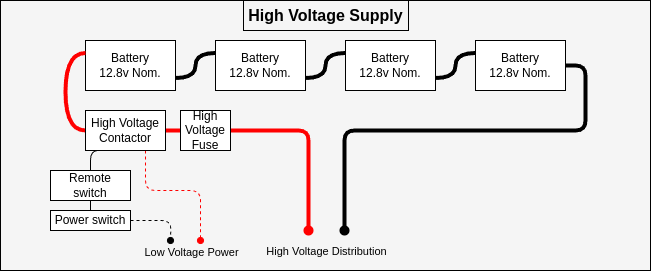
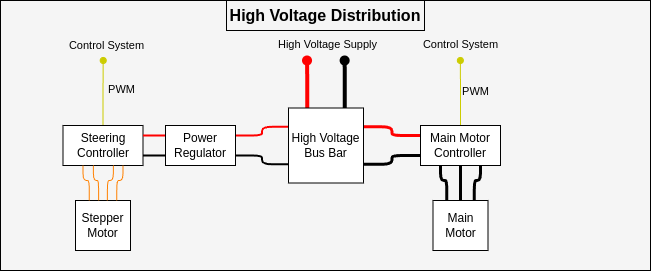
Images
- Basic EasyEDA design
- Example project