
ROS2 Container to container communication
To-Do
- Determine why multicast send and receive are not working on our network
Setup
In this setup we have two containers:
- The Boston Dynamics ROS2 Spot ROS2 container in the an extension file build using these instructions.
- Our container built for spot
Network
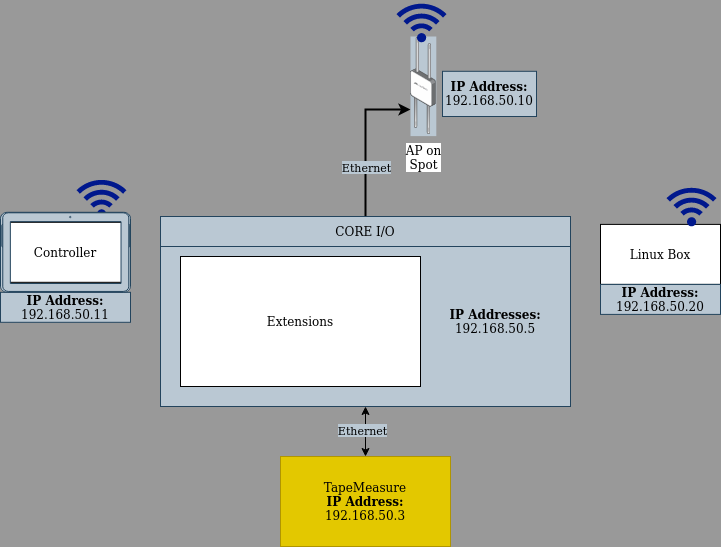
Container Configuration
Extension Container
So the Extension container was setup with the following commands to test:
ping 192.168.50.20 # Ping test the dev computer.
export ROS_DISCOVERY_SERVER=192.168.50.5:21000
# This was changed from the BD default of 192.168.80.3 because we are using our own WiFi setup that bypasses Spot's internal network.
source ./install/setup.bash # Source workspace
source /opt/ros/humble/setup.bash # Source ROS2