
Notes
11/08/2024
Meeting goals
Get ArduPilot up and running on Cube
Meeting Notes
What was completed?
- Installed latest ArduPilot firmware to Cube
- Issue with flashing firmware on QGC (Ubuntu), worked with APM Mission Planner (Windows)
- Once firmware updated, the FC was able to communicate with QGC
- Experimented with calibrating accelerometer and compass
- Telemetry Radio Manual
What is in progress?
- Looking in to telemetry radio - Matthew
- Goal is to have software fully integrated by the end of semester
- Working control (Thrust & Steering)
Working w/ RC Controller - Working GPS
Working Telemetry Radio
- Working control (Thrust & Steering)
What is the goal for the next meeting?
11/12/2024
Meeting goals
Meeting Notes
What was completed?
- Issue w/ QGC finding firmware seems to be fixed, able to flash autopilot firmware from QGC
- Got RC Receiver working by connecting receiber to RCIN pins on controller and forcing SBUS protocol in ArduPilot parameters
- Configured motor parameters, servo functions
- Servo 1 - Steering
- Servo 3 - Throttle
What is in progress?
What is the goal for the next meeting?
- Get PWM Control working
11/15/2024
Meeting goals
- Get PWM Control working with flight controller to control motor
Meeting Notes
What was completed?
- Researched GPS modules, trying to find one with the right connector and protocol to be recognized by AutoPilot
- Configured PWM output and got it working. Receiver is now controlling motor
What is in progress?
- Finalizing GPS modules pick
- Getting telemetry radio working
What is the goal for the next meeting?
- Get telemetry radio connection between ground station and flight controller
1/14/2025
Meeting goals
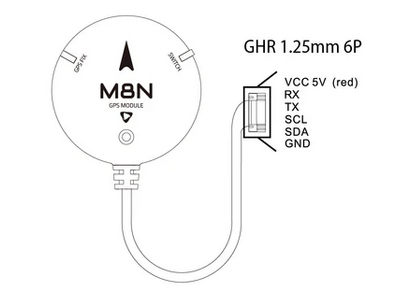
- Work on getting M8N GPS Module Connected
Meeting Notes
What was completed?
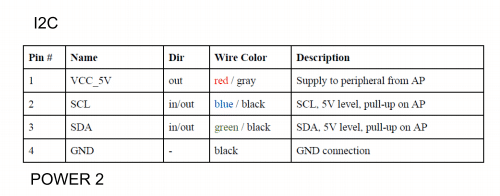
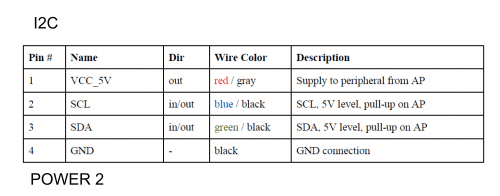
- Resoldered the wires on the GPS using these colors to connect it to I2C:
-
- Did not work
-
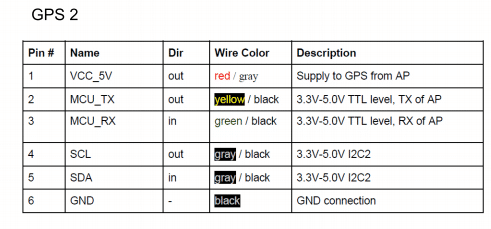
- I believe it should be this to connect it to the GPS 2 Module but unsure of how the colors line up:
-
What is in progress?
What is the goal for the next meeting?
- Resolder the 6 wires onto an 8 pin connector and test the GPS on the GPS2 Port
- If this does not work, pick out another GPS and order
Images